Robotic Arm End Effector
Objective
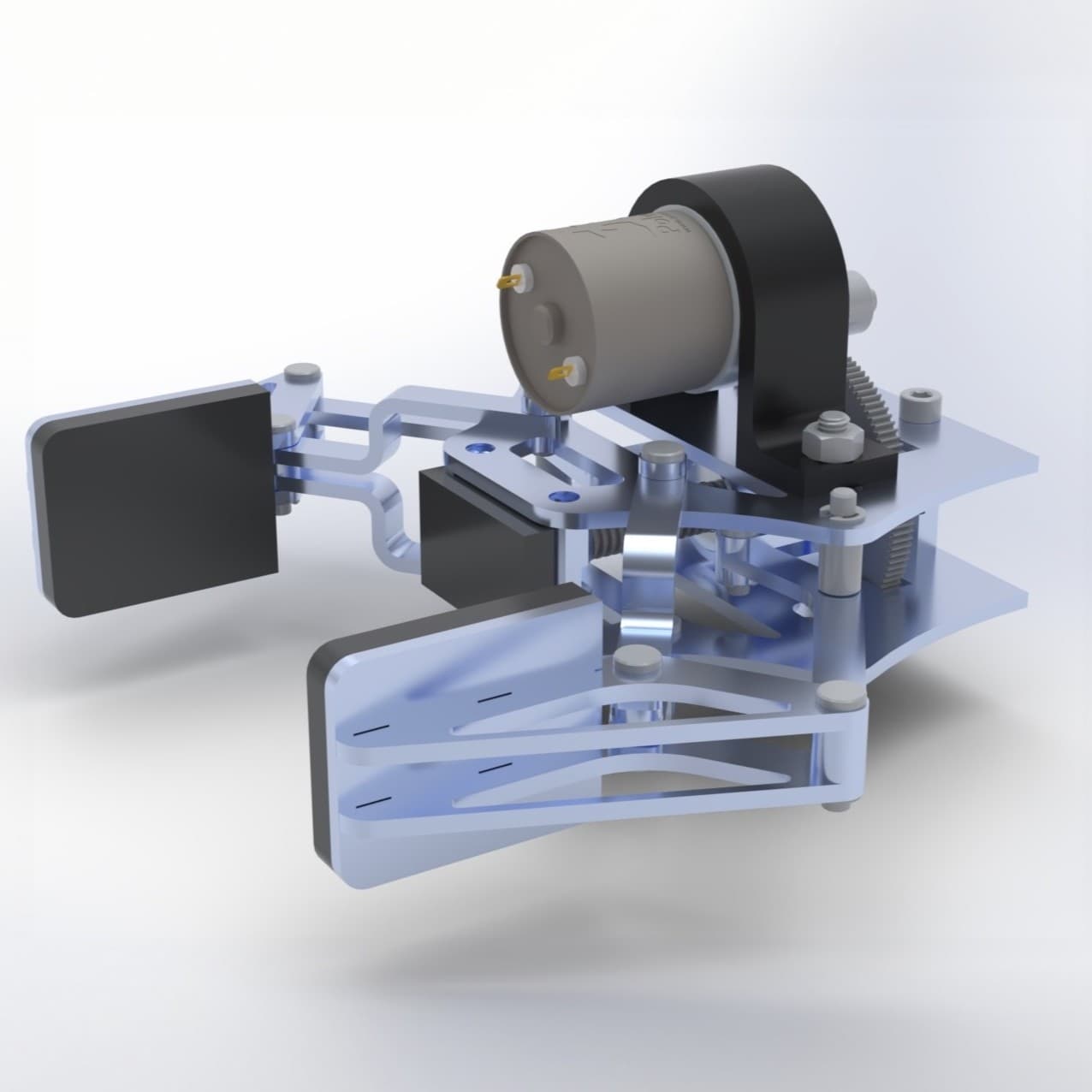
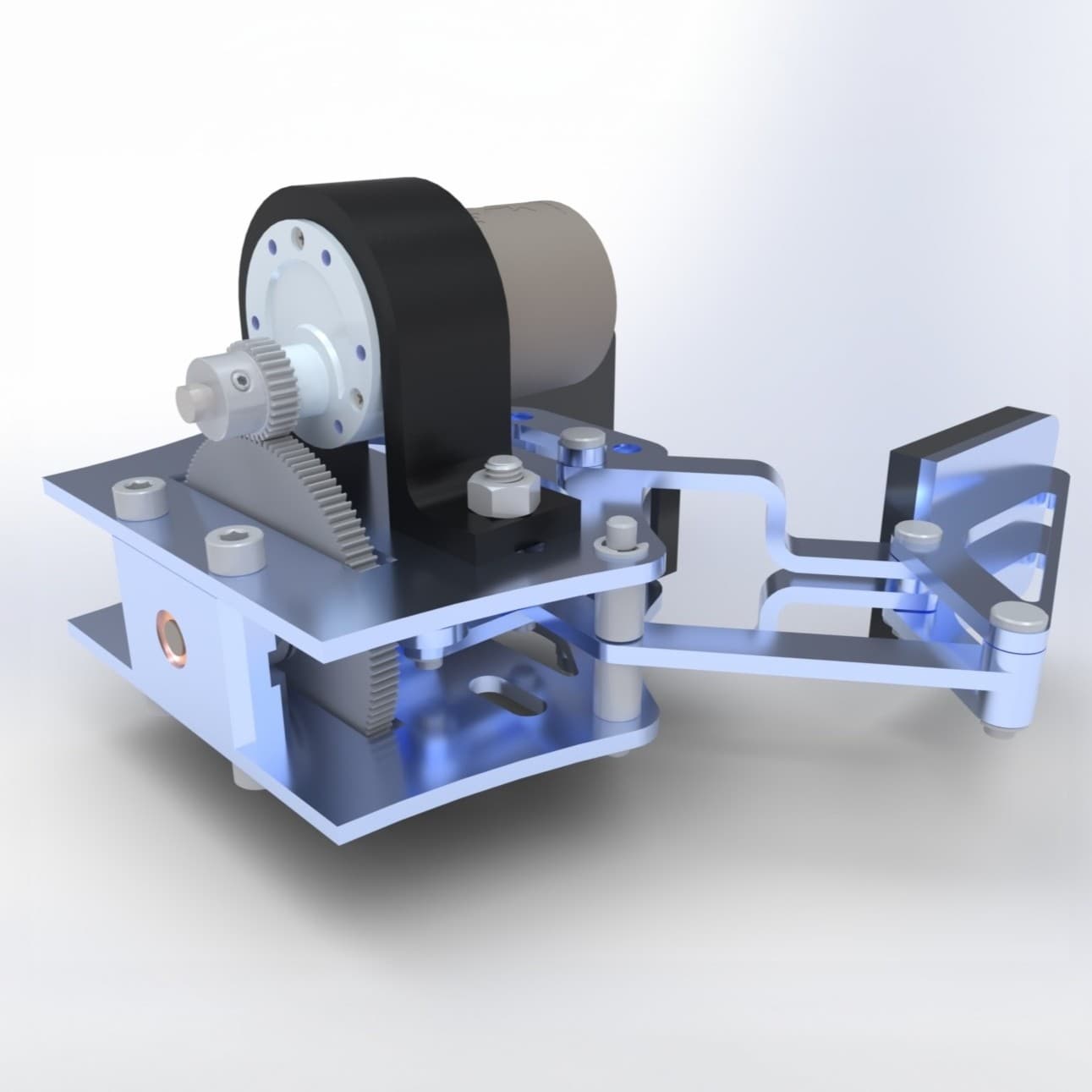
Enhance 3D modeling and design skills in SolidWorks by recreating a prototype end effector for the 2022 Mars Rover.
Process
Modeled and fully mated the end effector using advanced constraints in SolidWorks; dimensioned drawings for linkages and base plates; and designed parts for assembly using standard student machine shop tools such as mills and lathes.
Result
Developed a robust end effector capable of supporting a 5 kg load, advancing my proficiency in CAD and rendering with SolidWorks Visualize.








