Digit - Prosthetic Finger Prototype
Objective
Design and assemble a tendon-driven robotic joint prototype using Polycarbonate to validate mechanical compliance and real-time kinematic tracking.
Process
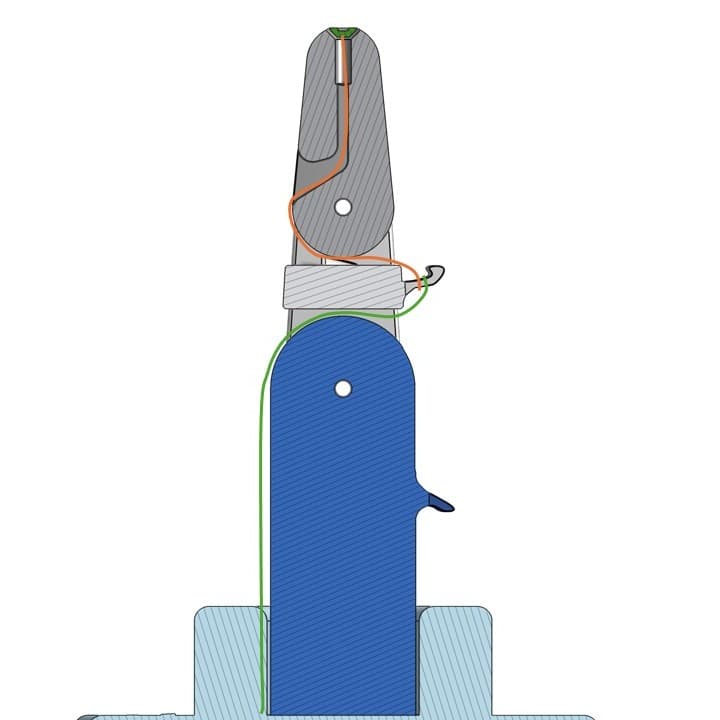
- Iterated mechanical joint designs in Onshape targeting a robust two-link testing rig within a strict three-day deadline
- Manufactured the physical prototype using Polycarbonate and integrated brass heat-set inserts for rigid fixturing
- Developed a custom Python tracking script utilizing OpenCV to isolate high-contrast fiducial markers via HSV color masking
- Implemented trigonometric modeling using arctangent functions to calculate precise internal joint angles
- Created a dynamic video overlay to output live flexion telemetry and automated quality control status
- Skills used:
- Onshape (CAD)
- Polycarbonate 3D printing
- Hardware integration
- Python for data tracking
- OpenCV for computer vision
Results
Delivered a compliant tendon-driven test platform capable of real-time kinematic evaluation and automated range of motion validation, with integrated visual telemetry for mechanical analysis.







