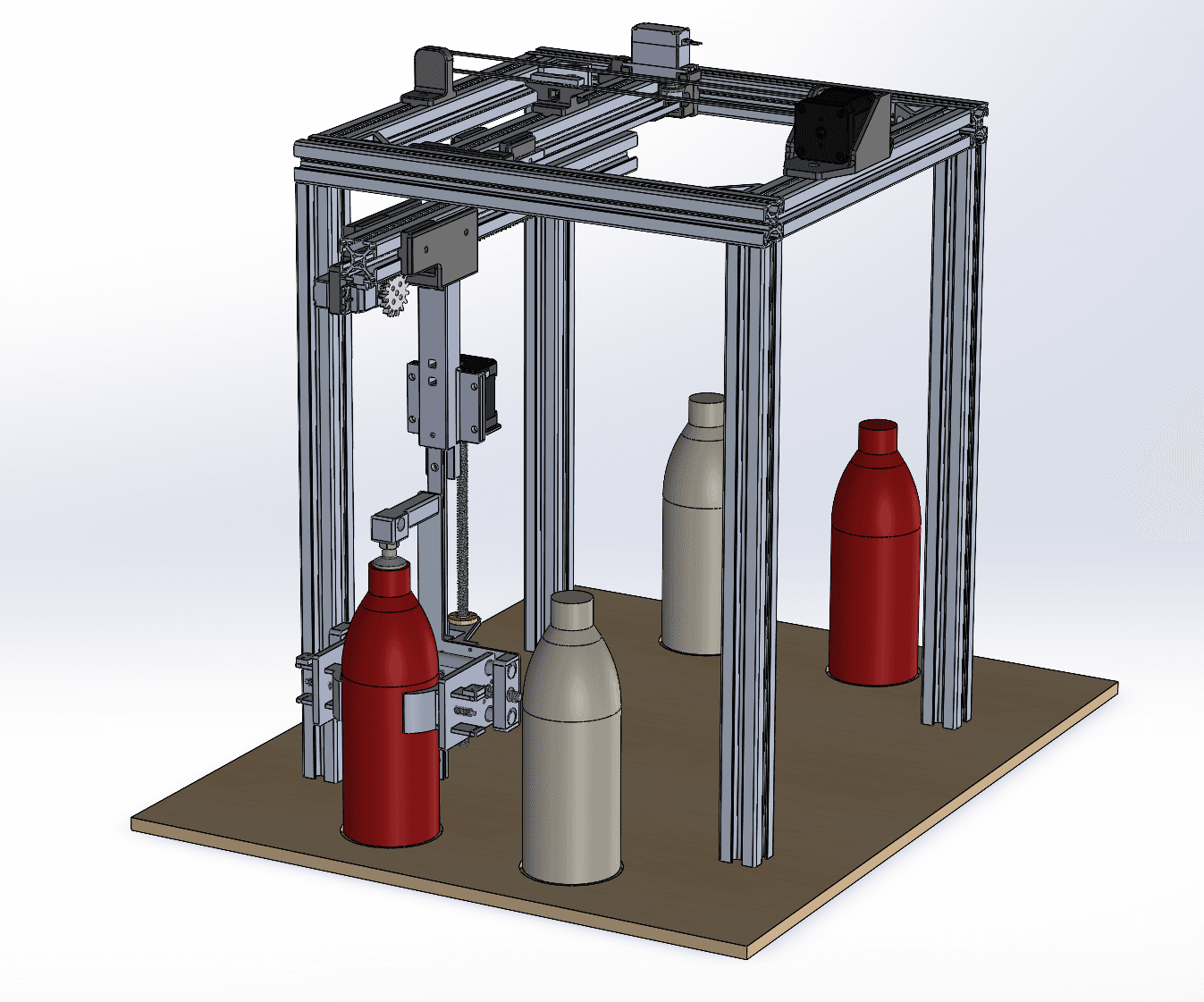
3-Axis Pick-and-Place Gantry
Group Project Assembly

Main Contributions
Objective
Automate the handling of Coca Cola shaped bottles (30–70 mm diameter) with a precision drop of ±2 mm while remaining under a $300 CAD budget.
Process
- Led gripper design reviews to ensure every decision aligned with high-precision core objectives.
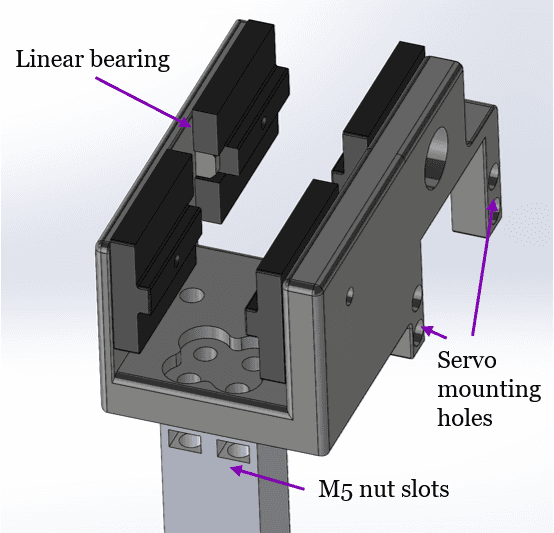
- Designed all 3D printed components and sheet metal gripper assembly using SolidWorks.
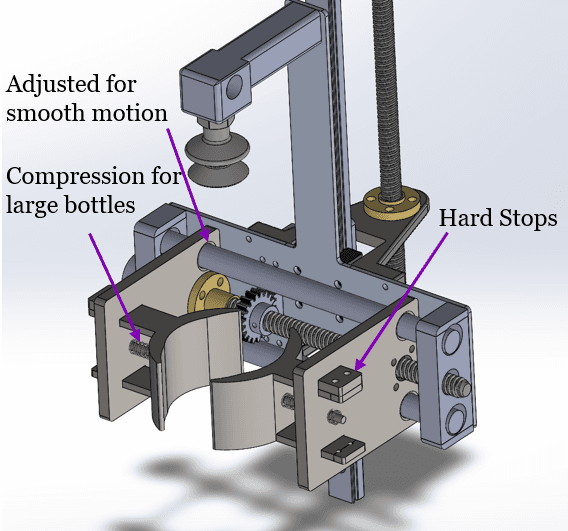
- Integrated springs on the gripper holders to accommodate varying bottle diameters without complex software programming.
- Redesigned the Z-axis connection piece using linear bearings and alignment features to eliminate jerking motion during transport.
- Skills used:
- SolidWorks
- 3D Printing
- Rapid Prototyping
- Sheet Metal Design
- System Controls
- Wire Soldering
Result
Successfully maintained a jerk below 3 m/s³, ensuring suction remained active during transport for a reliable ±2 mm precision drop-off.






